


01ΜζΤς»Υ±®Ψ·ΓΑ20252Γ±Θ§ΒγΜζΈ¬Ε»ΗΏΘ§DRV1Ι ’œ¥Πάμ
¥ΠάμΖΫ ΫΘΚΦλ≤ιΒγΜζ «ΖώΙΐ»»Θ§»γΒγΜζΈ¬Ε»’ΐ≥Θ‘ρΦλ≤ιΝ§Ϋ”Βγά¬ «Ζώ’ΐ≥Θ(Ω…Ρή «ΩΊ÷ΤΙώ¥ΠΚΫΩ’≤εΆΖΟΜ≤εΚΟΠΥ»γΙϊ•Υ≤Μ≥ωΈ ΧβΘ§”÷Ή≈Φ±”ΟΜζΤς»ΥΘ§Ω…ΝΌ ±ΫΪ±®Ψ·–≈Κ≈ΕΧΫ”Θ§≤ΜΙΐΉΔ“βΘ§¥Υ ±ΒγΜζ’φ’ΐΙΐ»»Κσ“≤≤ΜΜα±®Ψ·Θ§Ω…ΡήΜα“ΐΤπΒγΜζ…’ößΓΘ
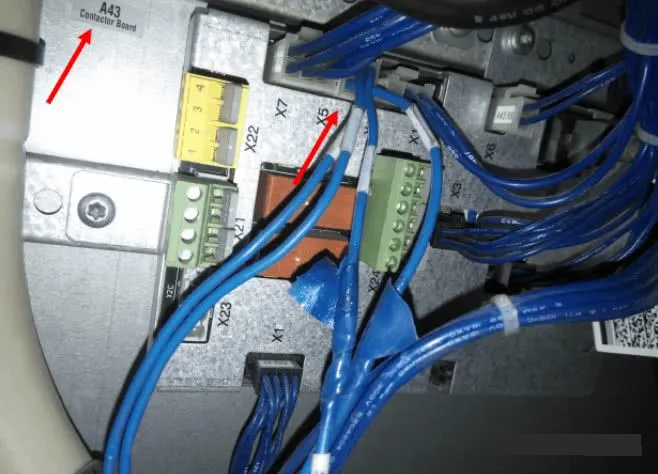
ΨΏΧε≤ΌΉςΖΫ ΫΘΚ‘ΎΩΊ÷ΤΙώΉσœ¬Ϋ«’“ΒΫA43ΑεΘ§’“ΒΫΑεΉ”…œ5≤εΆΖΘ§…œ±Ώ”–4ΗυœΏΘ§Τδ÷–œΏΚ≈ΈΣ439ΚΆ440ΒΡΝΫΗυœΏΨΆ «ΒγΜζΙΐ»»±®Ψ·–≈Κ≈œΏΫΪΝΫΗυœΏ¥”÷–ΦδΕœΩΣΘ§Α―ΑεΉ”’β±ΏΒΡΝΫΗυœΏΕΧΫ”Φ¥Ω…ΓΘΘ®»γœ¬ΆΦΘ©
02ABBΜζΤς»ΥΒγ‘¥ΡΘΩιΕΧ¬ΖΑεΕΧ¬ΖΙ ’œ¥Πάμ
»ΥΈΣ“ρΥΊΘΚ»»≤εΑΈ”≤ΦΰΖ«≥ΘΈΘœ’Θ§–μΕύΒγ¬ΖΑεΙ ’œΕΦ «»»≤εΑΈ“ΐΤπΒΡΘ§¥χΒγ≤ε≤ΠΉΑΑεΩ®ΦΑ≤εΆΖ ±”ΟΝΠ≤ΜΒ±‘λ≥…Ε‘Ϋ”ΩΎΓΔ–ΨΤ§Β»ΒΡΥπΚΠΘ§¥”ΕχΒΦ÷¬ΜζΤς»ΥΒγ¬ΖΑεΥπΜΒ;ΥφΉ≈ Ι”ΟΜζΤς»Υ ±ΦδΒΡ‘ω≥ΛΘ§ΜζΤς»ΥΒγ¬ΖΑε…œΒΡ‘ΣΤςΦΰΨΆΜαΉ‘»ΜάœΜ·Θ§¥”ΕχΒΦ÷¬ΜζΤς»ΥΒγ¬ΖΑεΙ ’œΓΘ
ΜΖΨ≥“ρΥΊΘΚ”…”Ύ≤ΌΉς’ΏΒΡ±Θ―χ≤ΜΒ±Θ§ΜζΤς»ΥΒγ¬ΖΑε…œ≤Φ¬ζΝΥΜ“≥ΨΘ§Ω…“‘‘λ≥…–≈Κ≈ΕΧ¬ΖΓΘ
03 ≤Ο¥«ιΩωœ¬–η“ΣΈΣΙΛ“ΒΜζΤς»ΥΫχ––±ΗΖί
1.–¬ΜζΤς***¥Έ…œΒγΚσ
2.‘ΎΉω»ΈΚΈ–όΗΡ÷°«Α
3.‘ΎΆξ≥…–όΗΡ÷°Κσ
4.»γΙϊΙΛ“ΒΜζΤς»Υ÷Ί“ΣΘ§Ε®ΤΎ1÷ή“Μ¥Έ
5.***ΚΟ‘ΎU≈Χ“≤Ήω±ΗΖί
6.ΧΪΨ…ΒΡ±ΗΖίΕ®ΤΎ…Ψ≥ΐΘ§ΧΎ≥ω”≤≈ΧΩ’Φδ
04ΜζΤς»ΥΩΣΜζΘ§ ΨΫΧΤς“Μ÷±œ‘ Ψœ¬ΆΦΫγΟφΘ§»γΚΈ¥Πάμ
1.ΜζΤς»Υ÷ςΜζΙ ’œ
2.ΜζΤς»Υ÷ςΜζΡΎ÷ΟΒΡcfΩ®Θ®sdΩ®Θ©Ι ’œ
3. ΨΫΧΤςΒΫ÷ςΜζ÷°ΦδΒΡΆχœΏΥ…Ε·Β»
¥ΠάμΖΫ ΫΘΚ
1.Φλ≤ι÷ςΜζ «Ζώ’ΐ≥ΘΘ§Φλ≤ι÷ςΜζΡΎsdΩ® «Ζώ’ΐ≥Θ
2.Φλ≤ι ΨΫΧΤςΒΫ÷ςΜζΆχœΏ «ΖώΝ§Ϋ”’ΐ≥Θ
05ΜζΤς»Υ≥ωœ÷±®Ψ·Χα Ψ–≈œΔ10106Έ§–ό ±ΦδΧα–― « ≤Ο¥“βΥΦ?
’β÷÷«ιΩω «ABBΜζΤς»Υ÷«Ρή÷ήΤΎ±Θ―χΈ§ΜΛΧα–―
06ΜζΤς»Υ‘ΎΩΣΜζ ±Ϋχ»κΝΥœΒΆ≥Ι ’œΉ¥Χ§»γΚΈ¥ΠάμΘΩ
1.÷Ί–¬ΤτΕ·“Μ¥ΈΜζΤς»Υ
2.»γΙϊ≤Μ––Θ§‘Ύ ΨΫΧΤς≤ιΩ¥ «Ζώ”–ΗϋœξœΗΒΡ±®Ψ·Χα ΨΘ§≤ΔΫχ––¥Πάμ
3.÷ΊΤτ
4.»γΙϊΜΙ≤ΜΡήΫβ≥ΐ‘ρ≥Δ ‘BΤτΕ·
5.»γΙϊΜΙ≤Μ––Θ§«κ≥Δ ‘PΤτΕ·
6.»γΙϊΜΙ≤Μ––«κ≥Δ ‘IΤτΕ·Θ®’βΫΪΜζΤς»ΥΜΊΒΫ≥ω≥ß…η÷ΟΉ¥Χ§Θ§–Γ–ΡΘ©
07ΜζΤς»Υ±ΗΖίΩ…“‘ΕύΧ®ΜζΤς»ΥΙ≤”Ο¬πΘΩ
≤ΜΡήΘ§±»»γΥΒΜζΤς»ΥΦΉAΒΡ±ΗΖί÷ΜΡή”Ο”ΎΜζΤς»ΥΦΉΘ§≤ΜΡή”Ο”ΎΜζΤς»Υ““Μρ±ϊΘ§“ρΈΣ’β―υΜα‘λ≥…œΒΆ≥Ι ’œΓΘ
08Ε‘”ΎΜζΤς»Υ±ΗΖί÷– ≤Ο¥ΈΡΦΰΩ…“‘Ι≤œμΘΩ
»γΙϊΝΫΗωΜζΤς»Υ «Ά§“Μ–ΆΚ≈Θ§Ά§“Μ≈δ÷ΟΘ§‘ρΩ…“‘Ι≤œμRAPID≥Χ–ρΚΆEIOΈΡΦΰΘ§ΒΪΙ≤œμΚσ“≤“ΣΫχ––―ι÷ΛΖΫΩ…’ΐ≥Θ Ι”ΟΓΘ
09 ≤Ο¥ «ΜζΤς»ΥΜζ–Β‘≠ΒψΘΩΜζ–Β‘≠Βψ‘ΎΡΡάοΘΩ
ΜζΤς»ΥΝυΗωΥ≈ΖΰΒγΜζΕΦ”–“ΜΗω***ΙΧΕ®ΒΡΜζ–Β‘≠ΒψΘ§¥μΈσΒΡ…ηΕ®ΜζΤς»ΥΜζ–Β‘≠ΒψΫΪΜα‘λ≥…ΜζΤς»ΥΕ·Ής ήœόΜρΈσΕ·ΉςΘ§ΈόΖ®ΉΏ÷±œΏΒ»Έ ΧβΘ§―œ÷ΊΒΡΜαΥπΜΒΜζΤς»ΥΓΘ
10ΜζΤς»Υ50204Ε·ΉςΦύΩΊ±®Ψ·»γΚΈΫβ≥ΐΘΩ
1.–όΗΡΜζΤς»ΥΕ·ΉςΦύΩΊ≤Έ ΐΘ®ΩΊ÷ΤΟφΑεΓΣΕ·ΉςΦύΩΊ≤ΥΒΞ÷–Θ©“‘ΤΞ≈δ ΒΦ ΒΡ«ιΩω
2.”ΟAccSet÷ΗΝνΫΒΒΆΜζΤς»ΥΦ”ΥΌΕ»
3.Φθ–ΓΥΌΕ» ΐΨί÷–ΒΡv_rot―Γœν
11ΜζΤς»Υ***¥Έ…œΒγΩΣΜζ±®Ψ·ΓΑ50296,SMBΡΎ¥φ ΐΨί≤ν“λΓ±»γΚΈ¥ΠάμΘΩ
1.ABB÷ς≤ΥΒΞ÷–―Γ‘ώ–ΘΉΦ
2.ΒψΜςROB_1Ϋχ»κ–ΘΉΦΜ≠ΟφΘ§―Γ‘ώSMBΡΎ¥φ
3.―Γ‘ώΓΑ***Γ±Θ§Ϋχ»κΚσΒψΜςΓΑ«ε≥ΐΩΊ÷ΤΙώΡΎ¥φΓ±
4.Άξ≥…ΚσΒψΜςΓΑΙΊ±’Γ±Θ§»ΜΚσΒψΜςΓΑΗϋ–¬Γ±
5.―Γ‘ώΓΑ“―ΫΜΜΜΩΊ÷ΤΙώΜρΜζ–Β ÷Θ§ Ι”ΟSMBΡΎ¥φ ΐΨίΗϋ–¬ΩΊ÷ΤΙώΓ±
12»γΚΈ‘ΎRAPID≥Χ–ράοΉ‘Ε®“εΜζΤς»ΥΙλΦΘ‘ΥΕ·ΒΡΥΌΕ»ΘΩ
1.‘Ύ ΨΫΧΤς÷ς≤ΥΒΞ÷–―Γ‘ώ≥Χ–ρ ΐΨί
2.’“ΒΫ ΐΨίάύ–ΆSpeeddataΚσΘ§ΒψΜς–¬Ϋ®
3.ΒψΜς≥θ Φ÷ΒΘ§SpeeddataΥΡΗω±δΝΩΚ§“εΖ÷±πΈΣΘΚv_tcp±μ ΨΜζΤς»ΥœΏ–‘‘Υ––ΥΌΕ»Θ§v_rot±μ ΨΜζΤς»Υ–ΐΉΣ‘Υ––ΥΌΕ»Θ§v_leax±μ ΨΆβΦ”÷αœΏ–‘‘Υ––ΥΌΕ»Θ§v_reax±μ ΨΆβΦ”÷α–ΐΉΣ‘Υ––ΥΌΕ»Θ§»γΙϊΟΜ”–ΆβΦ”÷α‘ρΚσΝΫΗω≤Μ”Ο–όΗΡ
4.Ή‘Ε®“εΚΟΒΡ ΐΨίΨΆΩ…‘ΎRAPID≥Χ–ρ÷–Ϋχ––Βς”ΟΝΥ
13ΗΏΥΌ–ΐΉΣ ±≥ωœ÷ΒγΜζ≤ν¥μΦΤ ΐΤς“γ≥ωΙΐ¥μΘ§‘θΟ¥¥ΠάμΘΩ
ΗΏΥΌ–ΐΉΣ ±ΖΔΉςΒγΜζ≤ν¥μΦΤ ΐΤς“γ≥ωΙΐ¥μ
Ε‘≤Ώ1ΘΚ≤ιΩ¥ΒγΜζΕ·ΝΠΒγά¬ΚΆ±ύ¬κΤςΒγά¬ΒΡ≈δœΏ «Ζώ’ΐ»ΖΘ§Βγά¬ «Ζώ”–ΤΤΥπΘΜ δ»κΫœ≥Λ÷ΗΝν¬ω≥ε ±ΖΔΉςΒγΜζ≤ν¥μΦΤ ΐΤς“γ≥ωΙΐ¥μΘΜ‘ΥΉΣΙΐ≥Χ÷–ΖΔΉςΒγΜζ≤ν¥μΦΤ ΐΤς“γ≥ωΙΐ¥μΓΘ
Ε‘≤Ώ2ΘΚ‘ω¥σ≤ν¥μΦΤ ΐΤς“γ≥ωΥ°ΤΫ…ηΕ®÷ΒΘΜΦθ¬ΐ–ΐΉΣΥΌΕ»ΘΜ―”≥ΛΦ”ΦθΥΌ ±ΦδΘΜΗΚ‘ΊΙΐ÷ΊΘ§–η«σ¥”ΆΖ―ΓΕ®Ηϋ¥σ»ίΝΩΒΡΒγΜζΜρΦθ«αΗΚ‘ΊΘ§Φ”ΉΑΦθΥΌΜζΒ»¥ΪΕ·Ήι÷·ΧαΗΏΗΚ‘Ί≤≈ΡήΓΘ
14‘Ύ”–¬ω≥ε δ≥ω ±≤ΜΙΛΉςΘ§‘θΟ¥¥ΠάμΘΩ
ΦύΕΫ≤ΌΩΊΤςΒΡ¬ω≥ε δ≥ωΒ± ±÷Β“‘ΦΑ¬ω≥ε δ≥ωΒΤ «Ζώ…ΝΥΗΘ§≥–»œ÷ΗΝν¬ω≥εœ÷“―¬Ρ––≤Δœ÷“―’ΐ≥Θ δ≥ω¬ω≥εΘΜ
≤ιΩ¥≤ΌΩΊΤςΒΫ«ΐΕ·ΤςΒΡ≤ΌΩΊΒγά¬Θ§Ε·ΝΠΒγά¬Θ§±ύ¬κΤςΒγά¬ «Ζώ≈δœΏΙΐ¥μΘ§ΤΤΥπΜρ–μΫ”¥Ξ≤ΜΝΦΘΜ
≤ιΩ¥¥χ÷ΤΕ·ΤςΒΡΥ≈ΖΰΒγΜζΤδ÷ΤΕ·Τς «Ζώœ÷“―Ζ≠ΩΣΘΜ
ΦύΕΫΥ≈Ζΰ«ΐΕ·ΤςΒΡΟφΑε≥–»œ¬ω≥ε÷ΗΝν «Ζώ δ»κΘΜ
Run‘ΥΉΣ÷ΗΝν’ΐ≥ΘΘΜ
≤ΌΩΊ–Έ Ϋ±Ί–κΧτ―ΓΖΫΈΜ≤ΌΩΊ–Έ ΫΘΜ
Υ≈Ζΰ«ΐΕ·Τς…η÷ΟΒΡ δ»κ¬ω≥εάύ–ΆΚΆ÷ΗΝν¬ω≥εΒΡ…η÷Ο «ΖώΙ≤Ά§ΘΜ
»Ζ±Θ’ΐΉΣ≤ύ«ΐΕ·÷Τ÷ΙΘ§ΜΊΉΣ≤ύ«ΐΕ·÷Τ÷Ι–≈Κ≈“‘ΦΑ≤ν¥μΦΤ ΐΤςΗ¥ΈΜ–≈Κ≈ΟΜ”–±Μ δ»κΘ§Ά―ΩΣΗΚ‘ΊΕχ«“Ω’‘Ί‘ΥΉΣ’ΐ≥ΘΘ§≤ιΩ¥Μζ–ΒΧεœΒΓΘ
15ΟΜ”–¥χΗΚ‘Ί±®Ιΐ‘ΊΘ§‘θΟ¥¥ΠάμΘΩ
ΦΌ»γ «Υ≈ΖΰRunΘ®‘ΥΉΣΘ©–≈Κ≈“ΜΫ”»κΕχ«“ΟΜ”–ΖΔ¬ω≥εΒΡ«ιΩωœ¬ΖΔΉςΘΚ
≤ιΩ¥Υ≈ΖΰΒγΜζΕ·ΝΠΒγά¬≈δœΏΘ§≤ιΩ¥ «Ζώ”–Ϋ”¥Ξ≤ΜΝΦΜρΒγά¬ΤΤΥπΘΜΦΌ»γ «¥χ÷ΤΕ·ΤςΒΡΥ≈ΖΰΒγΜζ‘ρ±Ί–κΫΪ÷ΤΕ·ΤςΖ≠ΩΣΘΜΥΌΕ»ΜΊ¬Ζ‘ω“φ «Ζώ…η÷ΟΙΐ¥σΘΜΥΌΕ»ΜΊ¬ΖΒΡΜΐΖ÷ ±Φδ≥Θ ΐ «Ζώ…η÷ΟΙΐ–ΓΓΘ
ΦΌ»γΥ≈Ζΰ÷Μ «‘Ύ‘ΥΉΣΙΐ≥Χ÷–ΖΔΉςΘΚ
ΖΫΈΜΜΊ¬Ζ‘ω“φ «Ζώ…η÷ΟΙΐ¥σΘΜΕ®ΈΜΆξ≥…Ζυ÷Β «Ζώ…η÷ΟΙΐ–ΓΘΜ≤ιΩ¥Υ≈ΖΰΒγΜζ÷α…œΟΜ”–Ε¬ΉΣΘ§≤Δ¥”ΆΖΒς’ϊΜζ–ΒΓΘ
ΗϋΕύœξ«ι«κΙΊΉΔΘΚABBΜζΤς»ΥΉ®”Σ